What makes Interstellar’s black hole so visually spectacular? I explore the physics behind the film: http://leuvendiaries.blogspot.be/2015/02/interstellar-inspirational-science.html
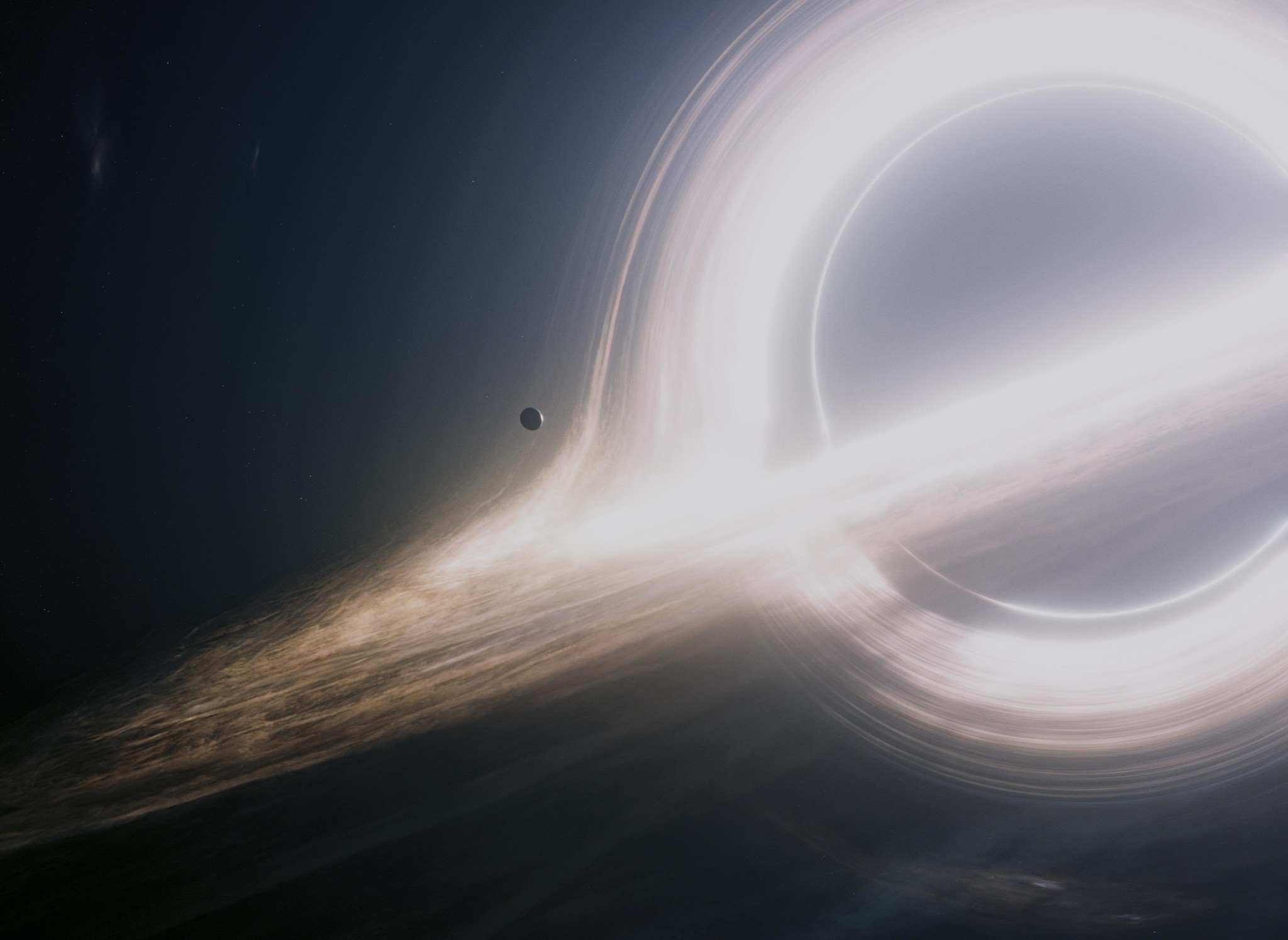
The black hole Gargantua, from the film Interstellar [source]

What makes Interstellar’s black hole so visually spectacular? I explore the physics behind the film: http://leuvendiaries.blogspot.be/2015/02/interstellar-inspirational-science.html
The black hole Gargantua, from the film Interstellar [source]
“The development of full artificial intelligence could spell the end of the human race” – Stephen Hawking.
“AI represents an existential threat to mankind” – Elon Musk.
What is it about AI today, that is making leading scientists and engineers sit up and take notice? Does it really pose an existential threat, as Hawking and Musk would have us believe?
The real threat, I discover is one of jobs and livelihoods to hundreds of millions in the developed world. More about the current state of the art in AI, and its possible social impacts in my post: The Real Risks of AI.
 [source]
[source]
A first implementation of detecting stixels from stereo data.
Stixels, a compact representation of 3D space for robot obstacle avoidance and navigation. Introduced by Badino et. al., 2009, stixels are a method to detect the nearest obstacles in front of a stereo camera pair by looking for discontinuities in the depth data. The idea is that the ground plane has monotonically decreasing depth (disparity) along each row, moving upwards from the bottom of the depth map, and obstacles represent a discontinuity in the depth profile of the ground plane. Stixels are visualized as matchstick-like volumes sitting up from the road space and clusters of them are used to represent obstacles around a robot. In this video, from top left, in raster order are: left camera image, disparity map, polar occupancy grid, cartesian occupancy grid and finally, the stixel representation, with blue bars representing the stixels, the nearest obstacles around the robot. The data is the Banhoff sequence, a commonly used stereo dataset from ETH, Zurich.
This implementation detects stixels from the full depth map (as in the original Badino paper), but a much faster stixel implementation without depth map computation has been shown by Benenson et. al, 2011 and my implementation of that is work in progress.
Stixel representation was used in the computer vision algorithms on the Mercedes Benz S500 prototype autonomous vehicle that drove autonomously between Mannheim and Pforzheim recently, on the 125th anniversary of Bertha Benz’s drive of the original Benz along the 100 kms of the same route.
Stixel representation is a compact representation of the space around a robot (or an autonomous vehicle) and can be used to aid obstacle avoidance, path planning and pedestrian detection.

What better way to spend a rainy June afternoon than to wander through the halls of the British Museum, taking in 2500 year-old scenes, real and mythical, immortalized in marble? My report on the Elgin Marbles, here.
Dragons, humanoids, flying, crawling and climbing robots from ICRA 2014.
Nghia and my paper, Localization on Freeways using the Horizon Line Signature, has been accepted for publication at the Workshop on Visual Place Recognition in Changing Environments, held at the International Conference of Robotics and Automation (ICRA 2014) in Hong Kong.
A video describing the system is available here:
1,178 64×128 sized images of pedestrians (positive samples) and 4,530 of the same sized negative samples were extracted from the INRIA dataset and divided randomly into two to give a training set and a validation set. HoG features on the training images were used to train a Random Forests classifier. The number of trees was set to 100 and the maximum depth of each tree set to 5.
For detection, the search was carried out only over one scale (for testing purposes), on a separate set of images collected from the lab.
Completely un-optimized code on a Core-Two duo laptop already runs at 20 fps.
Lane Detection after filtering the image with a filter that accentuates vertical lines of a certain width and then applying the Hough Transform.
Passing the output of the Hough Transform through a Kalman Filter for temporal smoothing is expected to improve the consistency of lane detection.